
Thermal analysis and characterization of electronic systems requires a knowledge of fluid velocity. In pursuit of this information, we often resort to measurement or calculation. The issue of measurement becomes a challenge since we are dealing with rather complex flows that tend to be highly nonisothermal. Therefore, it is our intention in this article to highlight the need for velocity measurement and the right practices and sensors suitable for electronic enclosures.
Velocity and Heat Transfer
Cooling of electronic systems by natural (free) or forced convection requires a knowledge of the fluid velocity (gas or liquid). A cursory look at thermal transport and the heat transfer equations will further amplify the important role that fluid velocity plays in the transfer of heat.
Consider a channel made of two PCBs. Conservation of energy across this channel is defined by,
| Q= |
(1) |
where H is the enthalpy. Converting the change of enthalpy to change of fluid temperature and including the mass flow rate, we get:
Q=mCp(Tout -Tin )=![]() Vfluid Achannel Cp(Tout– Tin )
Vfluid Achannel Cp(Tout– Tin )
where Tout and Tin are the fluid temperature leaving and entering the channel respectively. Solve for the temperature rise,
| (Tout -Tin) = Q / |
(2) |
We see the presence of velocity in the denominator. Now consider heat transfer by convection from a surface – governed by Newton’s cooling law:
| Q=h Asurface (Tsurface -Tambient ) | (3) |
Using a typical correlation for the heat transfer coefficient (h) in laminar flow,
| h=C1 (Vfluid / L) n | (4) |
L= the characteristic length.
Substitute into equation (3) and solve for surface temperature rise above ambient,
| (Tsurface-Tambient)=Q / C1Asurface(Vfluid / L) n | (5) |
Equations (2) and (5) clearly show the important role fluid velocity plays in heat transfer, either in the form of change of enthalpy across the channel or by convection heat transfer from a surface. These equations show the inverse relationship between velocity and temperature rise – increasing the air velocity reduces the temperature rise in a given domain. Hence, thermal problems associated with cooling require the knowledge of fluid velocity as clearly depicted by equations (2) and (5).
The Role of Velocity in Electronics Cooling
The cooling of electronic systems by air or liquid is an inevitable task since power dissipation and complex packaging leave little choice for radiative cooling (with the exception of space electronics where space is used as the ultimate source for radiation exchange). Subsequently, a knowledge of fluid velocity becomes of paramount importance for the design and characterization of electronic systems. This need is independent of the cooling mode, whether this is natural or high velocity forced convection. To further amplify this need, let us look at three distinct yet related areas, where fluid velocity has direct impact. These are:
1. Junction temperature
2. Pressure drop calculation
3. Acousticnoise
1. Junction Temperature
Component junction temperature has evolved to be the focal point for the thermal management of electronic systems. If we look at an analytical expression for Tj (reference 1), we see how fluid velocity directly impacts its magnitude.
| (6) |
Where the subscript “A” refers to air, “b” refers to board, “c” refers to case and “ref” is the reference temperature seen by the component for radiation exchange (typically adjacent board temperature). To calculate junction temperature from the above equation Vfluid (the approach-air velocity) must be known.
2. Pressure Drop
Pressure drop in an electronic enclosure is a common calculation performed to either determine the average velocity or the fan size (reference 2). In either case, the relationship between the pressure drop and velocity is given by the following:
| (7) |
where K is the loss factor. Equation (7) shows a conventional equation that is used for higher speed flows. In fact, for low speed flows, the dependency between pressure drop and velocity tends to be linear. As a side note, due to the low velocities encountered in electronics enclosure, it is more challenging to measure pressure drop than the velocity. Nevertheless, the fluid velocity must be known for determination of the pressure drop.
3. Acoustic Noise
Cooling electronic systems by air is a common practice throughout the industry. In cases where the system is cooled by forced convection, a blower or a fan is used as the air mover. The size of the air mover is a function of the cooling requirements for the system and the individual components. Associated with the air movers is the acoustic noise that is generated as the result of the air moving within the system. If we look at the sound power level (Lw) for a blower, we can see the role air velocity plays in the noise generated by a blower, (reference 3)
| Lw=logh(G / |
(8) |
Likewise, LW for the small axial-flow fans is given by the following equation:
| Lw=3.71logVt+0.96logG-10.8 | (9) |
where,
G = the volumetric flowrate
N = the impeller speed in rpm
D = the impeller diameter
P = static pressure drop
Vt = the tip speed of the impeller
Equations (6) through (9) clearly demonstrate the pivotal role fluid velocity plays in the thermal management of electronic systems. Hence, fluid velocity measurement and accurate quantification is the cornerstone of the thermal management of electronic systems.
Sensors and Measuring Fluid Velocity
There are multiple sensor types for measuring fluid velocity. They include, particle tracing, pressure, hot-wire and optical sensors. Table 1 summarizes the salient features of each sensor type for velocity measurement (reference 3).
Table-1: Glossary of Sensors Used for Velocity Measurement
| Sensor Type | Mechanism | Advantages/Disadvantages |
| Particle Tracing | Visualizing the flow and measuring the time traveled in a given distance. | Applicable to low speed flows (e.g., natural convection) with minimal mixing. |
| Pressure Probes | Use of pressure drop across a nozzle to measure velocity (Bernoulli equation). | Useful for flow speeds greater than 1.5 m/s. However, the probes are intrusive and may cause flow alteration. |
| Hot Wire Anemometers (HWA) |
Heat transfer from a heated wire is correlated to velocity. | Suitable for all ranges of flow; requires careful calibaration for low velocities; sensitive to changes in the temperature of the flowing fluid (air). Sensor produces an analag signal. There are two types of HWA, fine wire (typically 5 micron in diameter) and thermistor based that tends to be more robust. |
| Laser Doppler Velocimetry (LDV) |
Use of light scattering from small particles and interpretation of the beat frequency from two incident laser beams to infer the fluid velocity. | Suitable for all ranges of the flow, requires seeding of the flow and a view window. Obstrucitons such as components, may make measurement difficult. System produces digital signal. |
| Particle Image Velocimetry (PIV) |
Inference of velocity from particle images at two time steps (similar to LDV but in a plane). | Similar to LDV. However, data processing is labor-and time intensive. |
What follows is a brief description of each sensor type used for velocity measurement:
Particle Tracking
Measuring velocity by visualizing the flow and time recording particle travel in a predetermined distance.
Equipment required:
1. Visualization agent (e.g., smoke for air and diluted inkfor liquids)
2. Camera or video recorders
3. Timer
Limitations:
- Suitable for low speed flows (e.g., natural or mixed convection)
Pressure Probes
This method takes advantage of the Bernoulli equation that relates the pressure drop to velocity:
![]() Equipment required:
Equipment required:
1. Pressure probe (Pitot tube).
2. Pressuretransducer or manometer.
Limitations:
- The probes large physical size tends to be intrusive and will alter the flow.
- Useful for flow speeds greater than 1.5 m/s. For flows below 1.5 m/s, micromanometers may be used for pressure measurement. However, extreme caution should be taken with its calibration, since it is difficult to accurately calibrate sensors at such low pressures and elevated fluid temperature.
Hot Wire Anemometer (HWA)
A thin wire (or a small thermistor) is maintained at a constant temperature (approx. 150°C to 250°C). The heat loss from the wire is due to convection heat transfer, which is then correlated to the stream velocity in which the wire resides. The correlation defines the voltage required to maintain the wire’s temperature constant. This concept makes the sensor into a heat transfer element, which is very sensitive to fluid temperature and heat transfer other than convection from the heated wire.
See Figure (1).
Equipment required:
1. Hot wire sensor and the supportingelectronics
2. Data acquisition system
Limitations:
- Delicate sensor and can be fragile
- Direction sensitive – cannot resolve the direction of the flow
- Adversely affected by the fluid temperature. For non-isothermal flows (flows seen in electronic enclosures), fluid temperature must be measured at the same location at which the velocity is measured.
- Sensitive to contamination
Laser Doppler Velocimetry (LDV)
LDV technique measures the speed of micron-sized seeding particles that flow through a pair of focused beams. The seeding particles pass through the measurement volume and scatter light proportional to their speed across the fringes. The light scattered by the particles is focused onto a photo detector which converts the oscillating light signal into the voltage signal. This signal is stored and converted to velocity. See Figure (2).
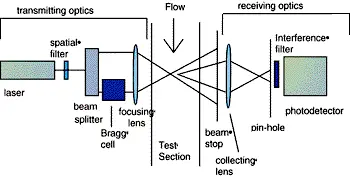
Figure 2 – Basic optical components of a dual beam – forward scatter LDV system [Ref 3]Equipment required:
1. Laser (s)
2. Optics
3. Frequency shifter
5. Particles or particle generator
Limitations:
- Requires a viewing window, hence, any obstacle will hinder measurement
- Requires seeding of the flow with small particles. Particles may be unacceptable in electronic enclosure when testing is done on production units
- Time-to-measurement may be long and require much effort for completing measurement
- Point measurement and requires traversing the beams
- Digital signal which depends heavily on the data rate stemming from seeding density
Particle Image Velocimetry (PIV)
PIV is a technique for measuring multiple points in a flow field simultaneously. It is effectively LDV in a plane. The measurement could contain thousand velocity vectors simultaneously.
See Figures (3) and (4).

Figure 3 – Schematic of Particle Image Velocimetry setup [Ref 3]
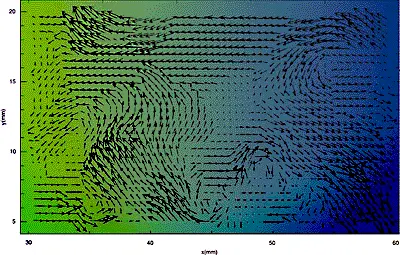
Figure 4 – Sample PIV results from a turbulent flow illustrating the capabilities of PIV system. [Ref 3]
Some of its salient features are:
- Non-intrusive (though the flow needs to be seeded)
- Velocity is measured in a plane (providing distribution and direction of the velocity)
- Provides both qualitative and quantitative data with the advantage to resolve directional ambiguity
Equipment required:
- 1. Laser (s)
- 2. Optics
- 3. Recording camera: CCD array or photographic camera
- 4. Computer for acquisition and processing of PIV images
- 5. Particles or particle generator
Limitations:
- Requires a viewing window, hence, any obstacle will hinder measurement.
- Requires seeding of the flow with small particles. Particles may be unacceptable in electronic enclosure when testing is done on production units.
Calibration
All velocity sensors indicated in this article require calibration. Calibration simply implies exposing the desired sensor to a known and traceable source to ensure that the sensor output matches the velocity from the source. The issue of calibration becomes a point of contention at low speed flows. These are flows that are typically encountered in natural or mixed convection cooling. On account of this difficulty, many vendors tend to extrapolate the calibration from high speed data to effectively zero flow. This practice may not be acceptable due to the non-linear response of the sensors. Hence, it is important to ensure that the calibration at low speed flows (below 1.5 m/s or 300 ft/min) is done properly. This problem can potentially be amplified when the flow is non-isothermal. Ideally, the calibration should take place at different fluid temperatures to capture the effect of the temperature in the calibration data. It is the author’s recommendation that if a vendor does not have the proper facility, a calibration rig be set up at the user’s facility for such calibrations, or sensors be sent to a facility that can perform the calibration.
Minimizing Error in Velocity Measurement
Given the resources available to thermal engineers in most electronics companies, and considering the above review of different instruments available for velocity measurement, Hot Wire Anemometers (HWA) are most suitable for velocity measurement in electronic systems. When measuring velocity with HWAs, we need to be cognizant of the following sources of error:
1 – Frequency Response of the System
The system rate of sampling must be higher than the flow frequency to ensure flow details are properlycaptured.
2 – Low Profile Sensors
The sensor geometry must be low profile to create the least disturbance in the flow. This is a particular point of contention in electronic enclosures since small footprints and compact packaging provides a challenge in the selection of the appropriate HWA sensor, in order to ensure that sensor will not alter the flow. Any blockage introduced by the sensor will divert the flow and the measurement will not be reflective of the actual system if the sensor was not there.
Table (2): Summary of the velocity sensors and their application
| Sensor | CMP | BRD | SYS | ENV | Remarks |
| Hot Wire | |||||
| Traditional (fine wire) |
X | X | Needs a traversing unit ot move the sensor around the component. Suitable for laboratory simulations. Must not be intrusive. | ||
| Low profile- portable (thermistor) |
X | X | X | X | Most suitable; has a broad application. Must ensure that the sensor rate of response matches flow frequency and that gas temperature is measured at the same location as velocity. |
| Pilot Tube | X | Requires high-speed flows unless attached to a calibrated micromanometer. These sensors are intrusive and may alter the flow field. | |||
| LDV | X | X | Requires clear viewing window and the flow must be seeded by micron size particles. Suitable for laboratory applications where the test rig is made of clear material, e.g., plexi-glass. Most ideal for a single component characterization. | ||
| PIV | X | X | Very similar to LDV. The viewing window and seeding of the flow are the points of contention. The system is costly and use should justify the cost. |
| * wire diameter is 5 micron | CMP – Component | SYS – System |
| **sensor is a thermistor and is portable | Brd – Board | ENV – Environment |
Table (3): Summary table of points of measurement in an electronic enclosure
| Location | Point of Measurement | Remarks |
| System Entrance (e.g., louvers) |
At the center of the opening. | Need to measure at least three points to resolve the flow. |
| Circuit Board | At the centerline of the channel formed by the adjacent boards. | Must ensure that the sensor is not blocking the opening. Need to measure five to seven points along the width of the channel. Make sure that the sensor does not block the channel. |
| Component | 1 – Upstream – place sensors upstream of the component. This location is at least half the component length upstream of the component of the interest. 2 – Top – need to traverse the probe. This is an active flow area, hence detailed measurement is required. |
1. – Need to measure the velocity at three points at the centerline of the channel or traverse the probe and average the results.
2. – Top of the component is an active flow area, hence, 5 points of measurement in the planar direction of the flow is required. |
| Heat sink | Same as item “I” in the component section. | Do not measure flow at the exhaust of the heat sink (highly mixed flow). The most useful measurement is the approach velocity. |
| Fan | Attach a plenum to the fan and measure air velocity 10 to 15 cm away from the fan (1 to 2 fan diameter). | Flow exiting the fan has a high level of turbulence. When traversing the sensor in the exhaust area, observe those air velocities that differ by a couple of orders of magnitude. The best practice is to direct the fan exhaust into a plenum and measure the velocity at several points away from the fan. |
| Ambient | Place sensor at a point at least half the width of the system away from the system. | Typical dispersion diameter for the flow around an obstacle (system or a component) is twice the width of the system normal to the flow. For the purpose of measuring the approach velocity, the sensor must be placed outside of this region. |
3 – Heat Transfer from the Sensor
Since HWA are heat transfer devices, loss of heat from the sensor that is not induced by convection (ie conduction and radiation heat transfer), yields flows at higher velocities than would be the case if conduction and radiation heat transfer were not present.
4 – Flow Induced from the Sensor
For the HWA to operate properly, the sensor (either thermistor or fine wire) must be at a temperature significantly above the fluid temperature. This can pose a problem for low speed flows since the convective currents generated by the sensor itself could adversely impact the region of measurement or the results. Hence, for such flows, the temperature difference between the fluid and the sensor must be reduced without the loss of accuracy in measurement.
5 – Calibration at Low Velocities
Low velocity flows (less than 1.5 m/s or 300 ft/min) are commonly encountered in electronic enclosures. When measuring flows below 1.5 m/s, the sensor must be specifically calibrated for this regime. One needs to ensure that the system is calibrated at that level and the calibration data is not a extrapolation from 1.5 m/s down to 0.15 m/s.
6 – Nonisothermal Flows
In electronic enclosures, the fluid temperature is not isothermal (constant), and a strong temperature gradient exists as one marches away from the components (where the heat is generated). Detailed measurements have shown that this gradient could be several degrees Celsius (more than 20°C). Therefore, since HWA are heat transfer elements, accurate velocity measurement requires that the fluid temperature be determined at the same point at which the velocity is being measured. If the velocity and temperature sensors are not co-located in the same plane, the resulting measurement is typically inaccurate. Detailed measurement has shown that even a couple of degrees of temperature difference results in velocities that are either higher or lower than those actually occurring in the system.
Summary
Table (2) reflects the utility of different sensors as applied to component, board, system and environment, and Table (3) shows the locations for measurement of velocity as applied to electronics thermal management, (reference 5).
References
| 1. | Azar, K., Electronics Cooling – Theory and Aplication short course offered by K. Azar, 1997. |
| 2. | Ellison, G. N., Fan Cooled Enclosure Analysis Using First Order Method, Electronics Cooling Magazine, Vol. 1, No.2, Oct. 1995. |
| 3. | Azar, K., Thermal measurements in Electronics Cooling, CRC Press, 1997. |
| 4. | Goldstein, R. J., Fluid Mechanics Measurements, Hemisphere Publishing Corp., 1983. |
| 5. | Azar, K., Experimental Methods in Electronics Cooling, a short course, 1997. |

